语义分割中的 ViT decoder
本文主要探讨语义分割任务中对 ViT 解码器的设计。
1. Rethinking Semantic Segmentation from a Sequence-to-Sequence Perspective with Transformers1
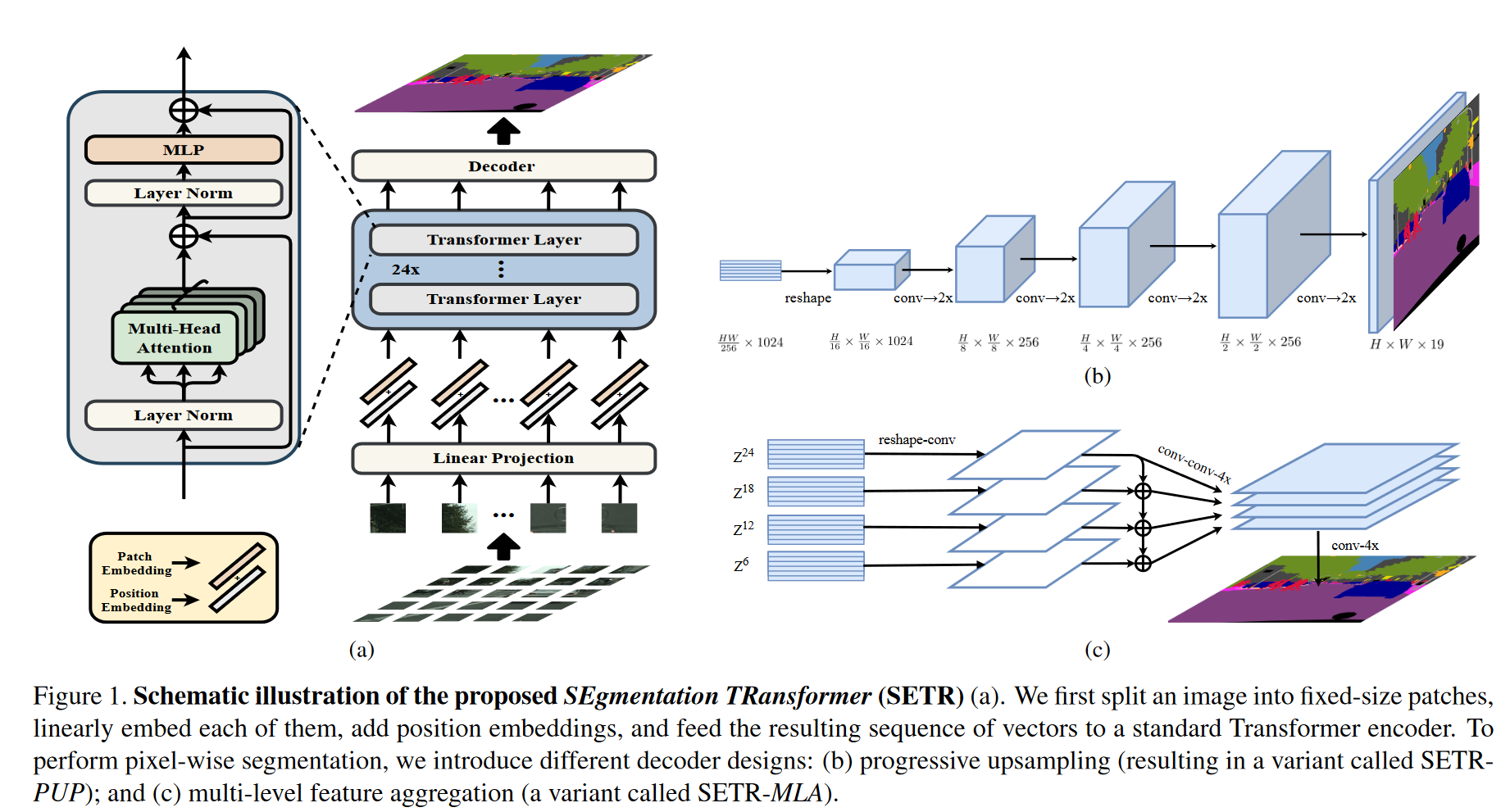
本文提出了一个纯基于ViT的语义分割模型SEgmentation TRansformer (SETR),并讨论了如何更好的设计解码器,以使ViT结构能够更好的用于语义分割任务。
1.1 动机
之前的语义分割工作的主流结构是全卷积神经网络(fully convolutional network,FCN)。该结构由编码器和解码器构成:编码器用于提取表征学习,解码器以编码器学习到的特征作为输入,进行逐像素的分类。基于CNN的架构具有平移等变性(translation equivariance)和局部性(locality):平移等变性质很好地尊重了成像过程的本质,这支撑了模型对不可见图像数据的泛化能力;而局部性通过空间参数共享控制模型复杂度。然而,基于CNN的策略受限于有限的感受野,无法捕捉长程依赖信息(long range dependency), 而这对语义分割是很重要的。
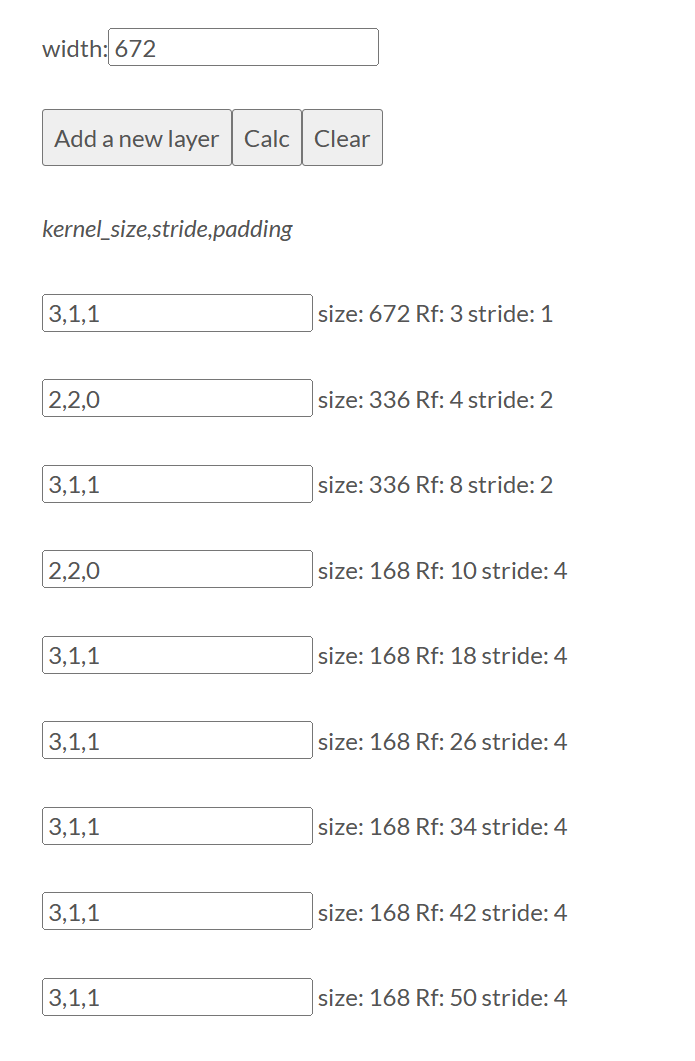
思考:SED基线模型CRNN中,最后一层CNN输出的感受野多大?
基线SED模型一共有七层CNN,CNN卷积核大小为3*3,步长为1;前两层的CNN接有大小为2的池化层。
注意到,最后一层输出的CNN感受野居然只有50,折合成时间,意味着CRNN的CNN输出只能看到周围0.7s的时间,如果考虑到,并非感受野内的所有区域都对最后的输出有着同等的影响,最后发挥作用的时间可能比0.7s还短…这种情况下,不加GRU分类效果差自然是应该的。
之前的一系列基于CNN的工作立足于扩大感受野,包括引入注意力机制。本文中,作者以纯transformer结构(ViT)作为编码器,以获取足够大的感受野。作者希望说明,传统CNN从局部到全局的结构可能是不必要的。文章贡献如下
- 利用transformer结构作为特征编码器;
- 研究了三种针对transformer的解码器设计;
### 1.2 解码器设计
从编码器得到的特征维度为$\frac{H}{16}\times\frac{W}{16}\times C$ ,解码器需要进行升维。作者提出了以下三个解码器方案
- Naive upsampling (Naive) 通过 1 × 1 conv + sync batch norm (w/ ReLU) + 1 × 1 conv 将通道维度从C(这里C=1024)转移到类别数,之后做简单的双线性插值,接softmax后得到输出。
- Progressive UPsampling (PUP) 见图(b)所示,一次性上采样可能引入噪声预测,因此采用逐步的上采样策略,每次只上采样2倍;
- Multi-Level feature Aggregation (MLA) 该设计旨在利用多尺度的特征,分别从等间隔的编码器输出中提取不同的层,卷积并相加后,将结果拼接起来,上采样+接全连接层得到最终结果。注意为了引入层与层之间的关联,这里还加了一个自上而下的传递过程,类似UNet。
1.3 实验结果
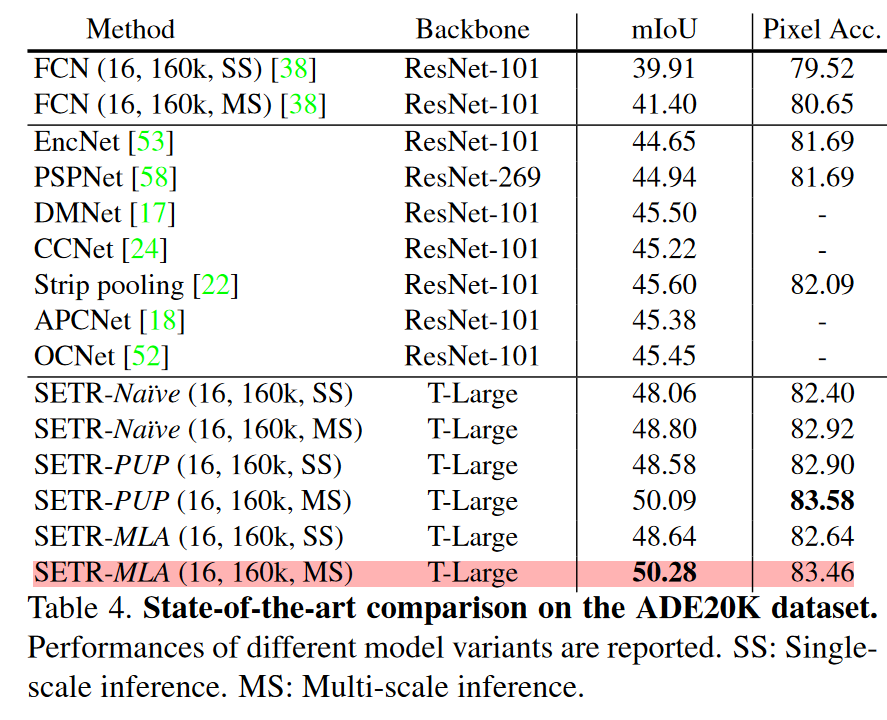
数据集: 作者在Cityscapes、ADE20K和PASCAL Context三个数据集上检验了模型效果。
- Cityscapes densely annotates 19 object categories in images with urban scenes. It contains 5000 finely annotated images, split into 2975, 500 and 1525 for training, validation and testing respectively. The images are all captured at a high resolution of 2048 × 1024. In addition, it provides 19,998 coarse annotated images for model training.
- ADE20K is a challenging scene parsing benchmark with 150 fine-grained semantic concepts. It contains 20210, 2000 and 3352 images for training, validation and testing.


多尺度推断(Multi-scale test): 我们使用 mmsegmentation [38] 的默认设置。 具体来说,首先将输入图像缩放到统一的尺寸。 然后以缩放因子(0.5、0.75、1.0、1.25、1.5、1.75)对图像进行多尺度缩放和随机水平翻转。 采用滑动窗口进行测试(例如,Pascal Context 为 480 × 480)。 如果短边小于滑动窗口的大小,则将图像的短边缩放到滑动窗口的大小(例如 480),同时保持宽高比。 同步BN用于解码器和辅助丢失头。 为了训练简单性,我们在模型训练中没有采用广泛使用的技巧,例如 OHEM 损失。
多尺度推理:通常用于改善语义分割的结果。 多个图像比例通过网络传递,然后将结果与平均或最大池合并。 精细的细节(例如物体的边缘或薄的结构)通常可以通过放大图像尺寸来更好地预测。 同时,对于较大结构的预测(需要更多的全局上下文),在缩小图像尺寸时通常会做得更好,因为网络的接收场可以观察到更多必要的上下文。
SED方向今年的interspeech是有类似思想的论文2
滑窗策略:主要针对大图,采用滑动窗扫描整张图,以提高对精细细节的分辨。
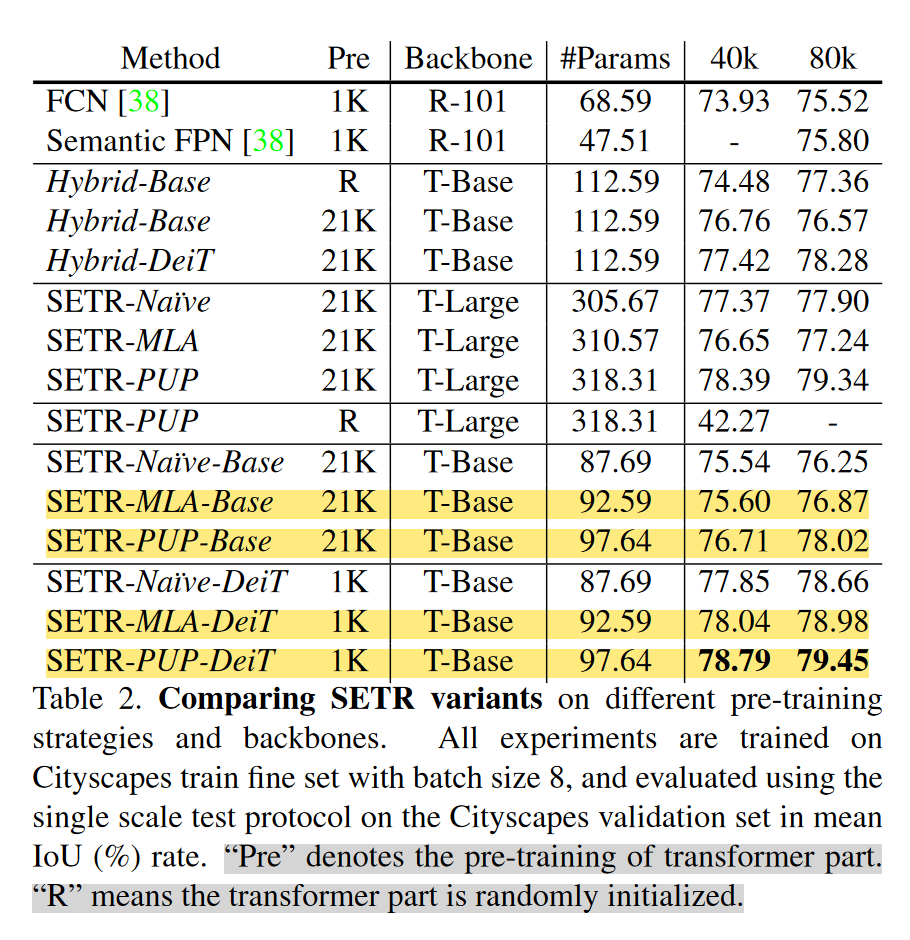
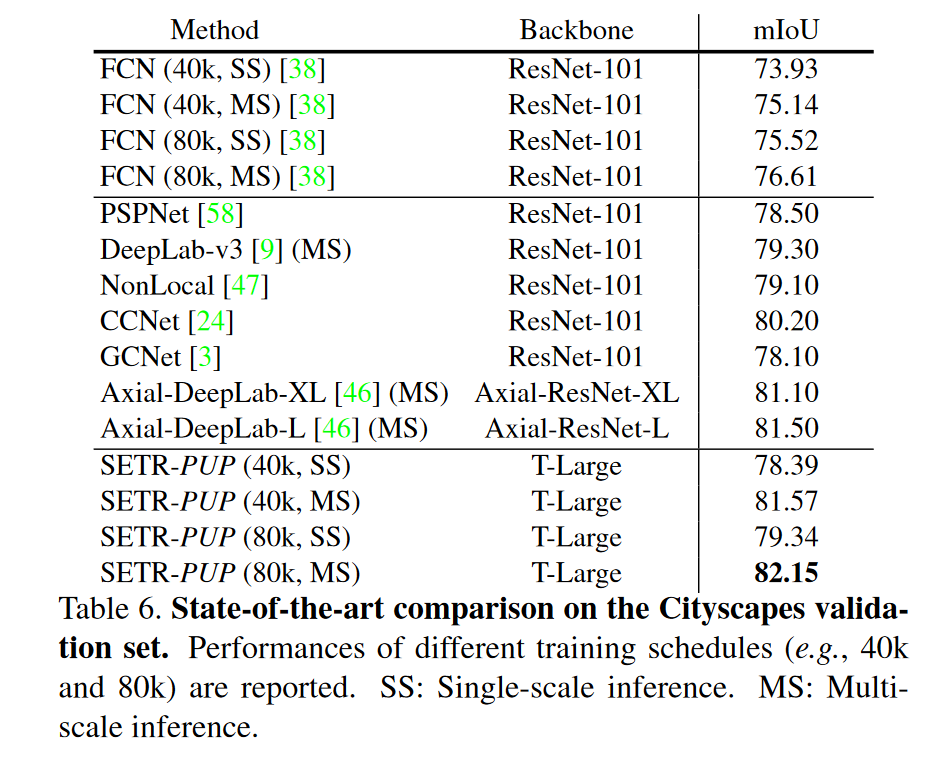
在CityScape 和 ADE20k实验结果见下图。可以看到的是
- 消融实验表明,在Cityscape数据集上,SETR-PUP更好,而在ADK20K上,SETR-MLA略好。作者认为造成SETR-MLA表现略差的原因是每层的分辨率相同,没法提供像特征金字塔结构那样不同层次的表征。
- Naive 结构总是不如 PUP结构;
- 多尺度推断的效果好的惊人,几乎稳高两个点…
SegFormer: Simple and Efficient Design for Semantic Segmentation with Transformers3
仍然是21年的工作…考虑到Swin也是发表在2021ICCV上,2021真是神仙打架…
2.1 动机
本文主要是以SETR为基线,在其基础上进一步改进,以解决SETR和基于ViT结构的缺点:
- ViT 只能生成单种分辨率的特征;
- ViT在大图片上计算代价太高;
在该文之前,已经有一系列工作解决这方面的问题,如Swin 和 Twins, 但作者认为这些模型关注编码器设计,但忽略了解码器的设计。不同于之前这些模型,SegFormer同时关注了编码器和解码器的设计。文章的创新点如下:
- 无需位置编码的层次化Transformer编码器:无需位置编码能使模型在推理时能够接受任意尺度的图片(虽然有位置编码的模型可以通过对位置编码插值做到这件事,但作者认为这样对性能有损失),而层次化的编码器能够生成多尺度特征 (这点和Swin是一样的)。
- 轻量化的全mlp解码器,能够同时利用底层的局部特征和顶层的全局特征,从而获得强大的表征。
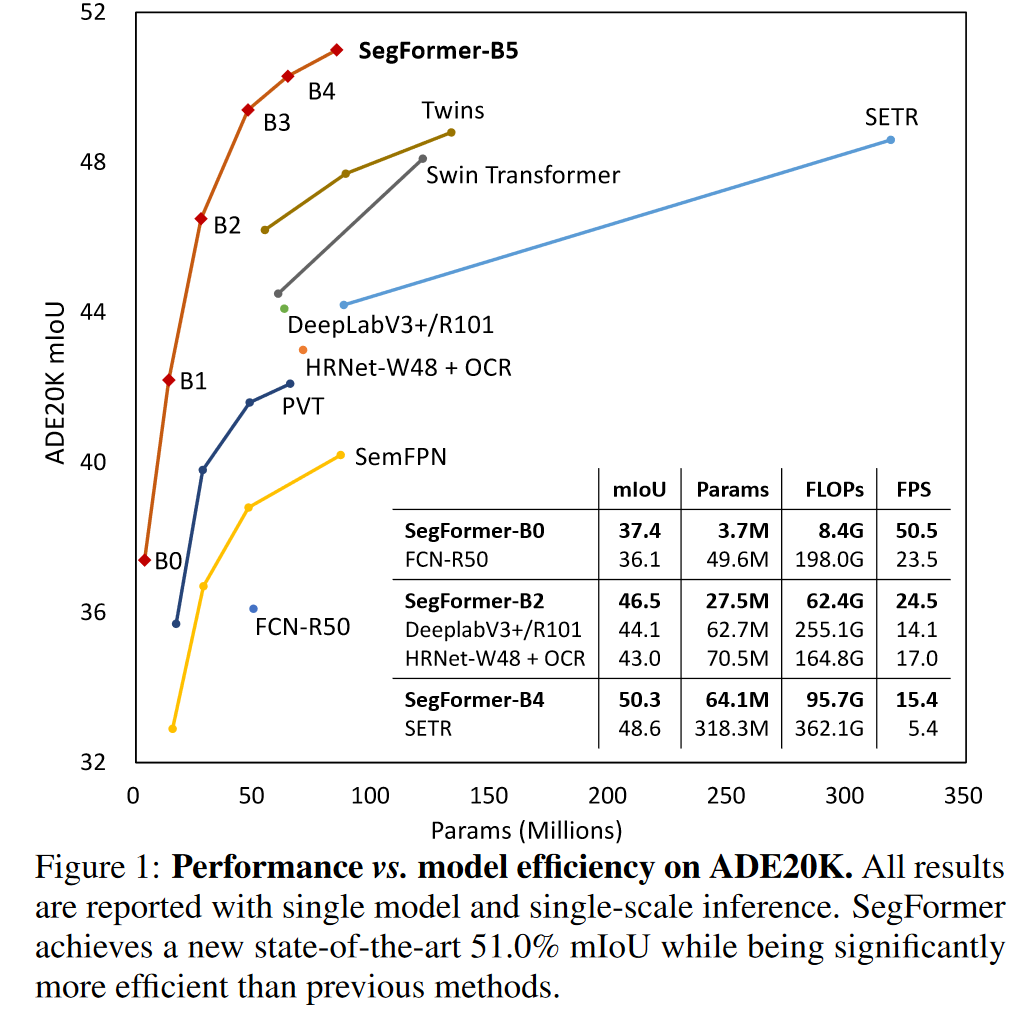
- 在分割任务上,和目前主流的基于transformer的策略相比,SegFormer在效率、准确性和鲁棒性三方面全部SOTA。
2.2 结构
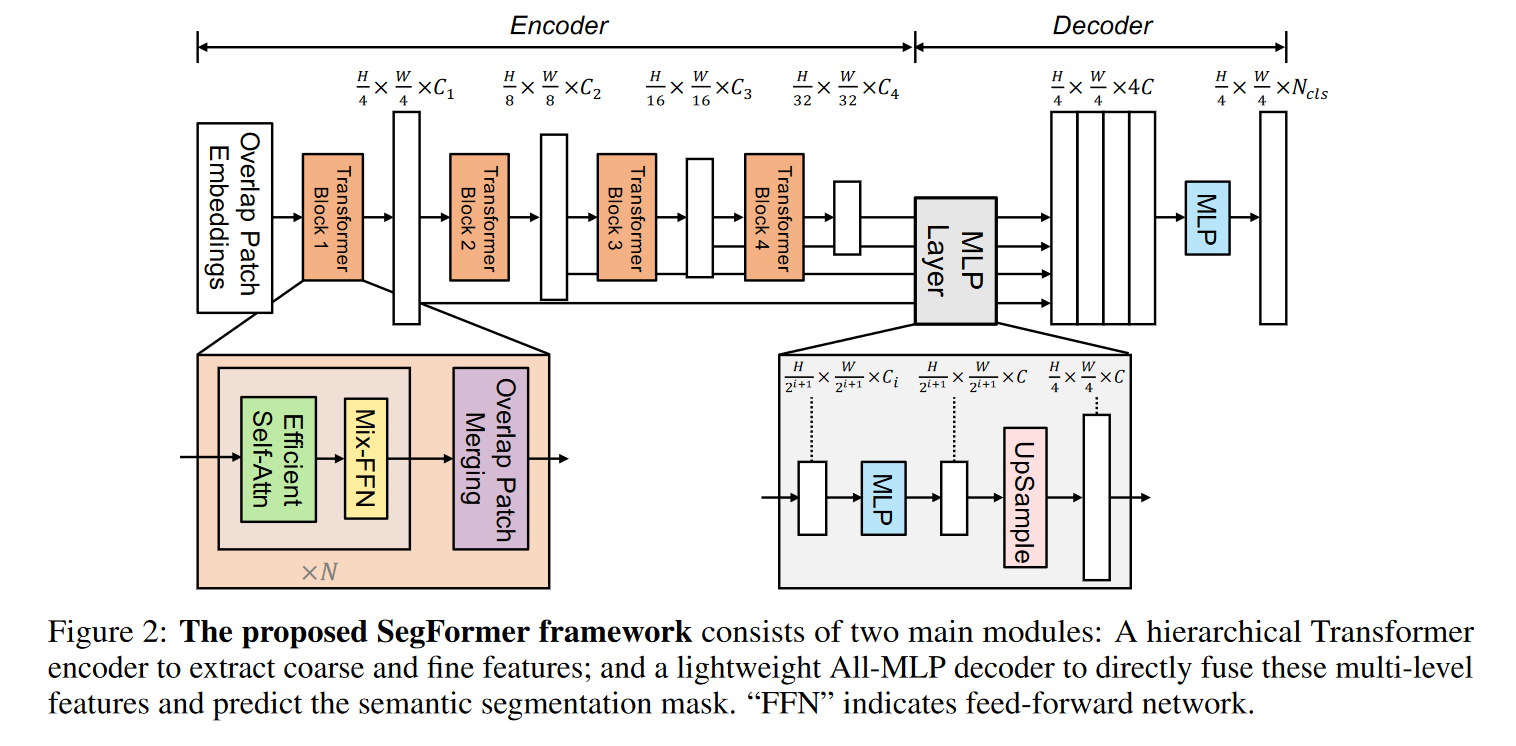
2.2.1 Encoder
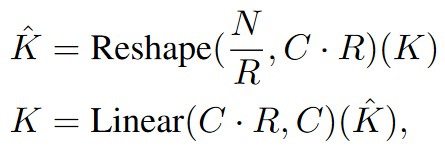
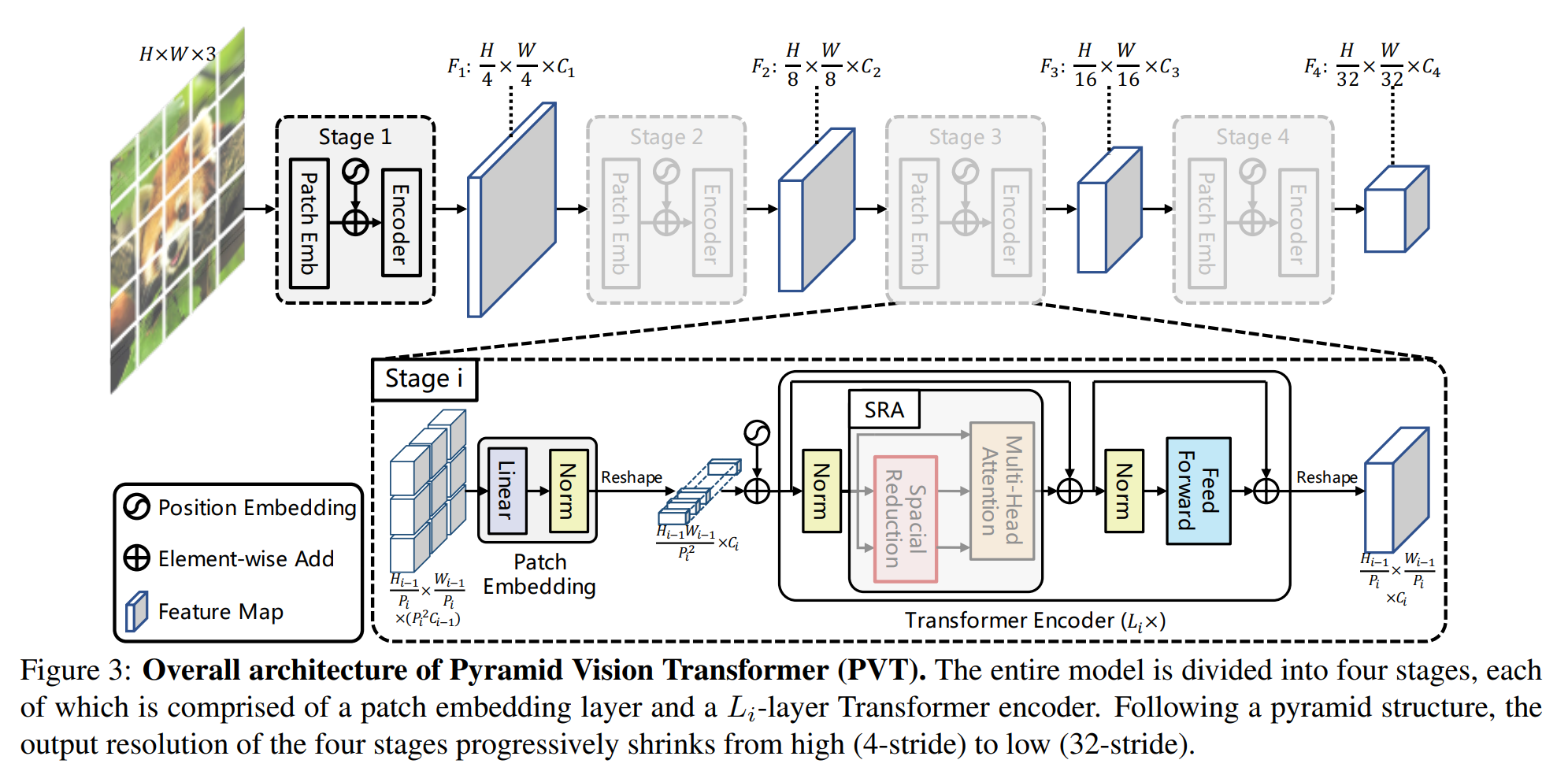
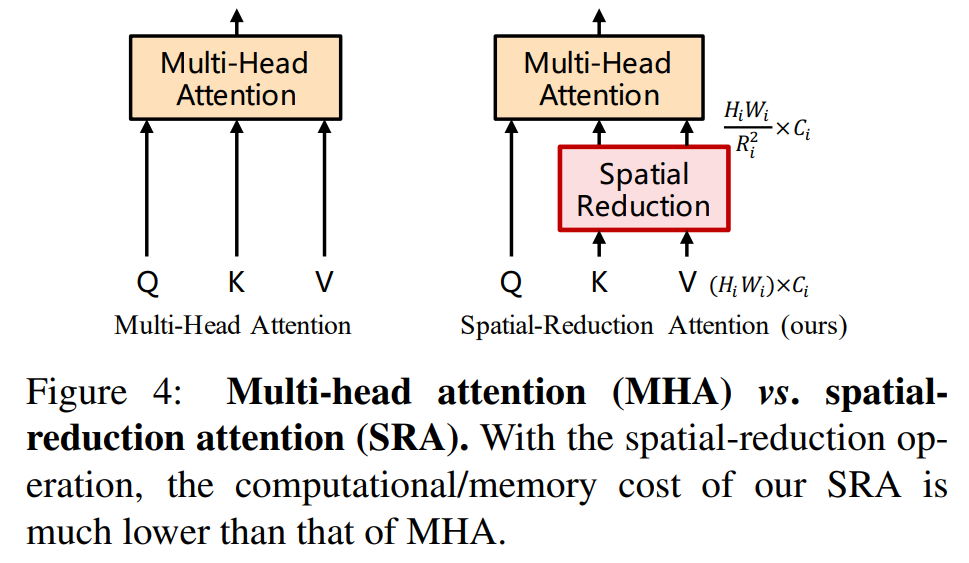
Efficent Self-Attention: 编码器首先对输入图像编码,将 4*4的块转成一个token。编码器使用的transformer结构来源于 Pyramid Vision Transformer4 ,其基本思想是把transformer的 K 和 V 压缩了$R^2$ 倍,从而达到节省计算量的目的 (从 attention 的计算公式上可以看出,其实把K和V同时降维,保留Q维度不变,输出维度也不变化。感觉这个技巧的本质是利用了图像信息的高度冗余性,对NLP来说,相邻的两个token可能完全不相似,但对于图像来说,相邻的两个token大概率差不多…)。这里R的取值4阶段分别为[64, 16, 4, 1]。所以kernelsize取[8, 4, 2, 1]。

class Attention(nn.Module):
def __init__(self, dim, num_heads=8, qkv_bias=False, qk_scale=None, attn_drop=0., proj_drop=0., sr_ratio=1):
super().__init__()
assert dim % num_heads == 0, f"dim {dim} should be divided by num_heads {num_heads}."
self.dim = dim
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
self.q = nn.Linear(dim, dim, bias=qkv_bias)
self.kv = nn.Linear(dim, dim * 2, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop)
self.sr_ratio = sr_ratio
if sr_ratio > 1:
self.sr = nn.Conv2d(dim, dim, kernel_size=sr_ratio, stride=sr_ratio)
self.norm = nn.LayerNorm(dim)
self.apply(self._init_weights)
#pass
def forward(self, x, H, W):
B, N, C = x.shape
q = self.q(x).reshape(B, N, self.num_heads, C // self.num_heads).permute(0, 2, 1, 3)
if self.sr_ratio > 1:#sr_ratio就是根号R
x_ = x.permute(0, 2, 1).reshape(B, C, H, W)
x_ = self.sr(x_).reshape(B, C, -1).permute(0, 2, 1)
x_ = self.norm(x_)
kv = self.kv(x_).reshape(B, -1, 2, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
else:
kv = self.kv(x).reshape(B, -1, 2, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
k, v = kv[0], kv[1]
attn = (q @ k.transpose(-2, -1)) * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
x = (attn @ v).transpose(1, 2).reshape(B, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
| Mix-FFN: 该结构就是 CNN+MLP。这里靠CNN发挥位置编码的作用(这里可以参见苏建林的博客:[让研究人员绞尽脑汁的Transformer位置编码 - 科学空间 | Scientific Spaces (kexue.fm)](https://kexue.fm/archives/8130) ,有文章证明,CNN可以通过填0的操作来获取位置信息5)。作者认为,CNN相比于位置编码可以更好的处理推理过程中不同大小的图片。 |

Overlapped Patch Merging: 为了保持patch周围之间的局部连续性,使用重叠的patch。实际上就是将输入图片x送入卷积,卷积中设定kernel_size,stride, padding分别设置为7,4,3和3,2,1(7, 4, 3 应该是用作最初的patch获取上)。
2.2.2 Lightweight All-MLP Decoder
相当简单,就是上采样完了直接拼起来。由于其输入patch大小是4*4,因此没进行上采样恢复到原始分辨率。
<img src=img/segment-VIT/1701606579058.png width=400>
注意:拼特征的时候似乎都不加激活函数;
class MLP(nn.Module):
"""
Linear Embedding
"""
def __init__(self, input_dim=2048, embed_dim=768):
super().__init__()
self.proj = nn.Linear(input_dim, embed_dim)
def forward(self, x):
x = x.flatten(2).transpose(1, 2)
x = self.proj(x)
return x
@HEADS.register_module()
class SegFormerHead(BaseDecodeHead):
"""
SegFormer: Simple and Efficient Design for Semantic Segmentation with Transformers
"""
def __init__(self, feature_strides, **kwargs):
super(SegFormerHead, self).__init__(input_transform='multiple_select', **kwargs)
assert len(feature_strides) == len(self.in_channels)
assert min(feature_strides) == feature_strides[0]
self.feature_strides = feature_strides
c1_in_channels, c2_in_channels, c3_in_channels, c4_in_channels = self.in_channels
decoder_params = kwargs['decoder_params']
embedding_dim = decoder_params['embed_dim']
self.linear_c4 = MLP(input_dim=c4_in_channels, embed_dim=embedding_dim)
self.linear_c3 = MLP(input_dim=c3_in_channels, embed_dim=embedding_dim)
self.linear_c2 = MLP(input_dim=c2_in_channels, embed_dim=embedding_dim)
self.linear_c1 = MLP(input_dim=c1_in_channels, embed_dim=embedding_dim)
self.linear_fuse = ConvModule(
in_channels=embedding_dim*4,
out_channels=embedding_dim,
kernel_size=1,
norm_cfg=dict(type='SyncBN', requires_grad=True)
)
self.linear_pred = nn.Conv2d(embedding_dim, self.num_classes, kernel_size=1)
def forward(self, inputs):
x = self._transform_inputs(inputs) # len=4, 1/4,1/8,1/16,1/32
c1, c2, c3, c4 = x
############## MLP decoder on C1-C4 ###########
n, _, h, w = c4.shape
_c4 = self.linear_c4(c4).permute(0,2,1).reshape(n, -1, c4.shape[2], c4.shape[3])
_c4 = resize(_c4, size=c1.size()[2:],mode='bilinear',align_corners=False)
_c3 = self.linear_c3(c3).permute(0,2,1).reshape(n, -1, c3.shape[2], c3.shape[3])
_c3 = resize(_c3, size=c1.size()[2:],mode='bilinear',align_corners=False)
_c2 = self.linear_c2(c2).permute(0,2,1).reshape(n, -1, c2.shape[2], c2.shape[3])
_c2 = resize(_c2, size=c1.size()[2:],mode='bilinear',align_corners=False)
_c1 = self.linear_c1(c1).permute(0,2,1).reshape(n, -1, c1.shape[2], c1.shape[3])
_c = self.linear_fuse(torch.cat([_c4, _c3, _c2, _c1], dim=1))
x = self.dropout(_c)
x = self.linear_pred(x)
return x
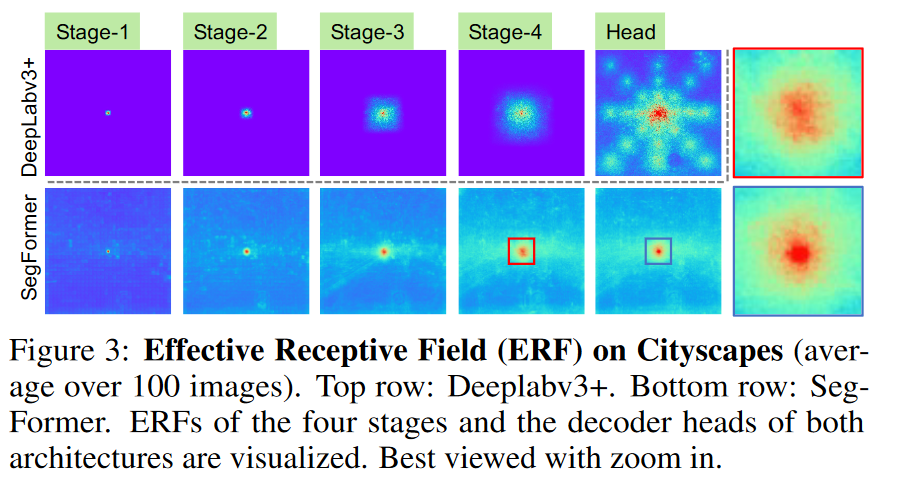
**感受野分析: ** Here, we use **effective receptive field (ERF) **[70] as a toolkit to visualize and interpret why our MLP decoder design is so effective on Transformers。该图应该是分析了图片最中间点的感受野。图中 DeepLabV3 是基于CNN 的目标检测网络。
- DeepLabV3 最后一层的感受野比SegFormer小不少,尽管该结构采用了诸多策略提升感受野;
- SegFormer 的底层具有局部感受野,而顶层具有全局感受野;
- mlp聚合后的感受野(蓝色框)比聚合前的更加聚焦于局部;
由于CNN顶层感受野太小,因此采用mlp聚合的解码器效果不明显。这点从之后的实验中可以看出。
2.2.3 和SETR的比较
-
We only use ImageNet-1K for pre-training. ViT in SETR is pre-trained on larger ImageNet-22K.
-
SegFormer's encoder has a hierarchical architecture, which is smaller than ViT and can capture both high-resolution coarse and low-resolution fine features. In contrast, SETR's ViT encoder can only generate single low-resolution feature map.
-
We remove Positional Embedding in encoder, while SETR uses fixed shape Positional Embedding which decreases the accuracy when the resolution at inference differs from the training ones.
-
Our MLP decoder is more compact and less computationally demanding than the one in SETR. This leads to a negligible computational overhead. In contrast, SETR requires heavy decoders with multiple 3×3 convolutions.
3 实验设置
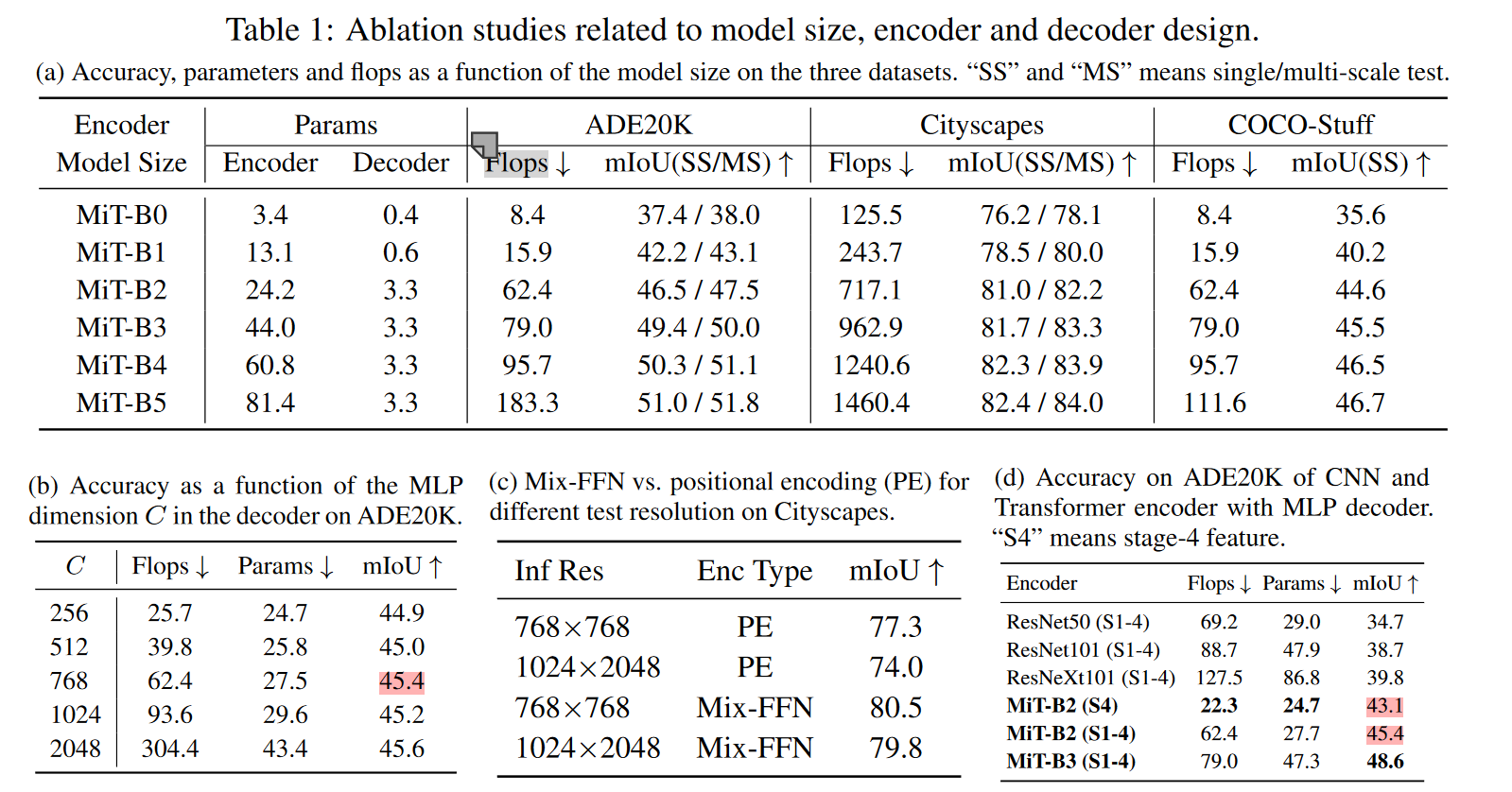
数据集: Cityscapes , ADE20K and COCOStuff
实现细节:
-
We used a batch size of 16 for ADE20K and COCO-Stuff, and a batch size of 8 for Cityscapes;
-
For Cityscapes, we do inference using sliding window test by cropping 1024 × 1024 windows(注意 Cityscape一张图片大小是2048*1024);
消融实验
-
Rethinking Semantic Segmentation from a Sequence-to-Sequence Perspective with Transformers, CVPR 2021 ↩
-
Resolution Consistency Training on Time-Frequency Domain for Semi-Supervised Sound Event Detection, interspeech2023 ↩
-
SegFormer: Simple and Efficient Design for Semantic Segmentation with Transformers, NIPS2021 ↩
-
Pyramid Vision Transformer: A Versatile Backbone for Dense Predictionwithout Convolutions, CVPR 2021 ↩
-
HOW MUCH POSITION INFORMATION DO CONVOLUTIONAL NEURAL NETWORKS ENCODE?, ICLR, 2020 ↩