Segmenter&Maskformer
1 Segmenter: Transformer for Semantic Segmentation1
1.1 动机
图像语义分割模型无法通过单个像素确定该位置的语义类别,需要依赖像素的上下文信息才能达成进行分类。传统的语义分割方法(Fully Convolutional Networks, FCN)通常依赖于卷积编解码器架构体系结构,其中编码器会生成低分辨率的图像特征,而解码器通过上采样特征得到类别掩码(mask)。但是,CNN的局部性质限制了对图像中全局信息的访问。而上下文信息对于分割任务尤其重要。为解决此问题,DeepLab方法引入特征聚集,并进行扩张的卷积和空间金字塔池。这允许扩大卷积网络的感受野并获得多尺度特征。但是,这种方法仍然依赖CNN作为主干模型,因此输出的特征偏向局部信息。
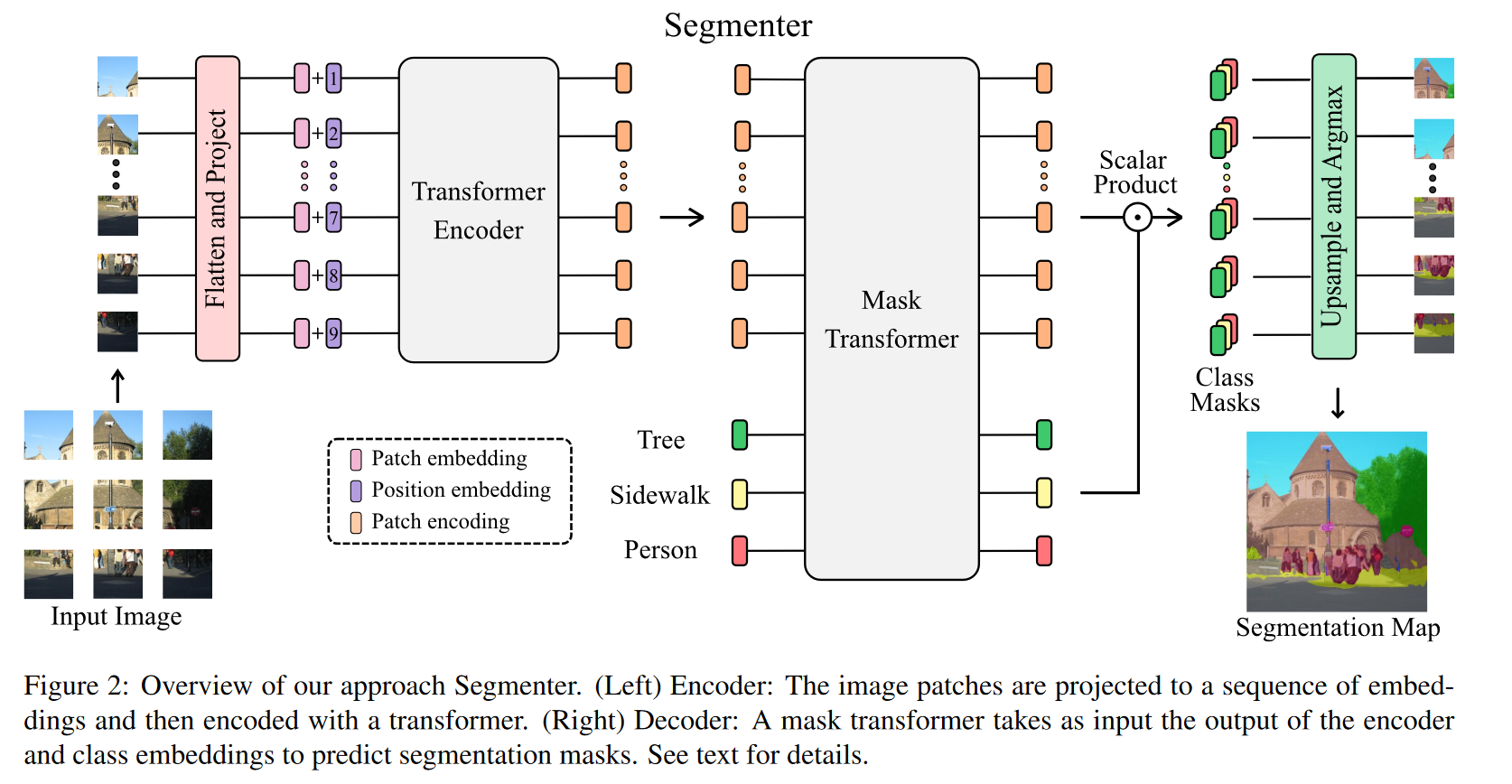
在本文中,我们介绍了一种用于语义分割的变换器模型 Segmenter。与基于卷积的方法相比,Segmenter使用预训练的ViT作为主干模型,允许在第一层即可对全局上下文进行建模。此外,本文探究了使用逐像素线性解码器和基于mask的Transformer解码器之间的差异。
1.2 结构
2 Per-Pixel Classification is Not All You Need for Semantic Segmentation2
2.1 动机
通常语义分割被视作单个像素的分类任务,而实例分割(包括全景分割)则被视为掩码分类任务。本文的看法是:可以使用一个基于掩模分类的模型,以统一的方式解所有的分割任务(语义分割,实例分割…)。在该想法的支持下,我们提出了maskformer,这是一个简单的掩码分类模型,该模型预测了一组二进制掩码,每个掩码都与单个全局类标签预测相关联。
2.2 背景知识
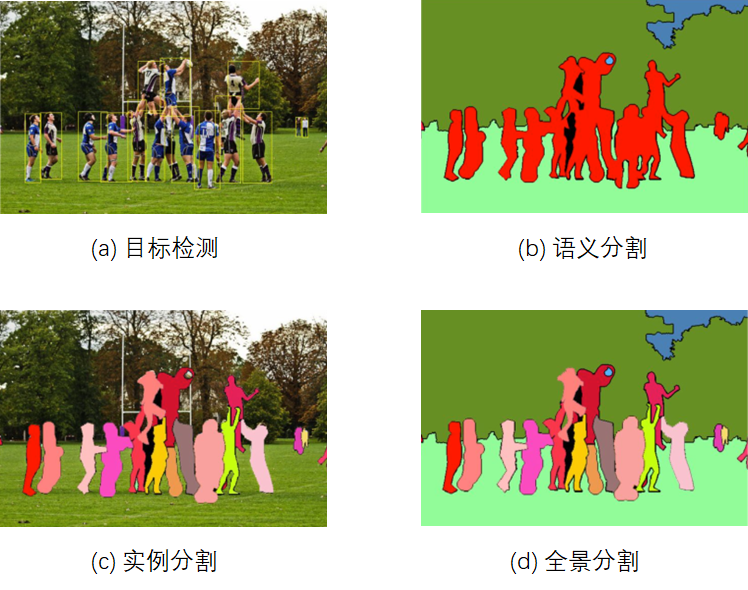
语义分割(semantic segmentation )、实例分割(instance segmentaion)和全景分割(Panoramic segmentation): 语义分割根据语义,为图像中的每个像素打标签; 实例分割只关心需要检测的类别,并将待检测类别的不同个体标记出来;全景分割则在实例分割的基础上,额外需要标记出背景的语义信息。
传统的语义分割采用逐像素分类的方式得到结果, 其输出的类别数是一定的;而实例分割则是预测一系列二进制编码,每个掩码代表一个实例,其输出的掩码数是可变的。
2.3 结构和损失函数
2.3.1 结构
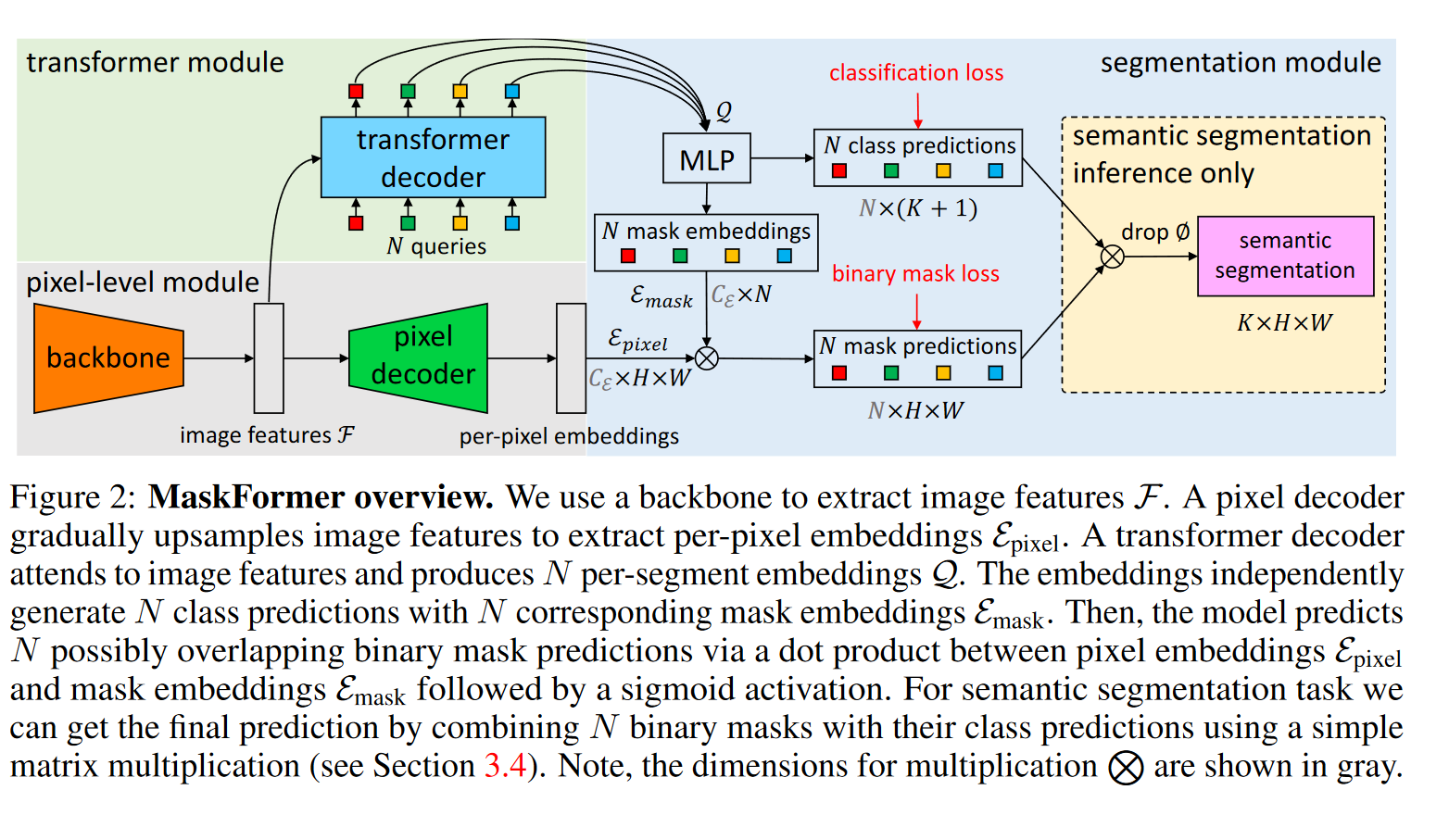
结构如上图所示,其中:
-
backbone: CNN 或者ViT(文中采用Swin)结构。注意采用 Swin 做backbone时,存在32倍的下采样;
-
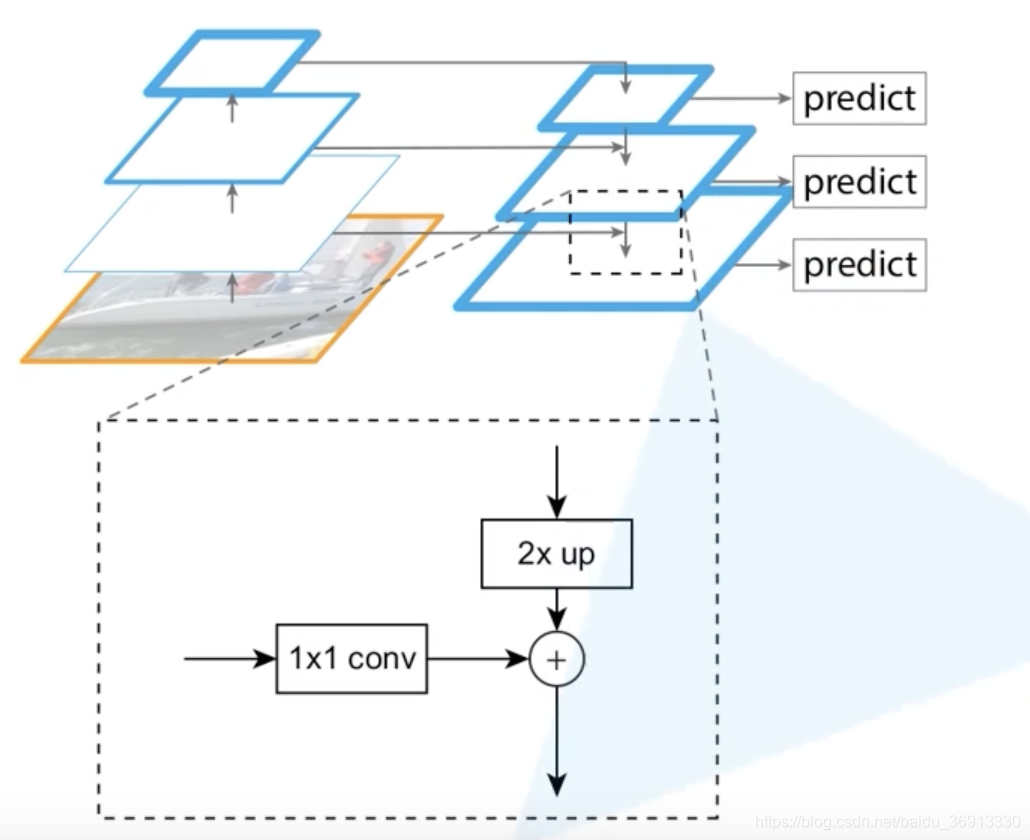
pixel decoder: 采用类似FPN(Feature Pyramid Networks)的结构,逐层上采样;
-
transformer decoder: 采用标准的解码器架构,由multi-head self-attention,encoder-decoder attention以及 feed-forward network组成。 其中encoder-decoder attention以cls queries 作为 queries, 以 来自编码器的特征作为key-value。decoder的数目为6层。但作者发现,对于语义分割任务而言,只需一层decoder也可以做的很好(详情见实验部分)。
- cls queries 初始化为零向量;
- 对每个queries加了可学习的位置编码;
2.3.2 损失函数
maskformer输入N个cls queries(N通常取100, 不一定等于类别数K,事实上N一般小于类别数),用于查询图像中存在的实例。类别分支的输出用于判断N个掩码的类别,而另一个分支输出N个掩码。
计算损失函数时,对于语义分割任务,可以采用fixed matching策略,如果N=K。这种策略将每个queries分配到固定的类别上。但作者通过实验发现, bipartite matching-based assignment 效果要比fixed matching更好,尤其在类别数比较多的情况下。bipartite matching策略下,每个queries匹配的类别不是固定的,需要结合ground truth 计算。
总的损失函数如下,由N个查询的分类损失和掩码损失相加组成。

2.3.3 语义分割任务的推理阶段
推理阶段对实例分割任务,对每个query得到的mask,取概率最大的类作为该mask的类别即可。但对语义分割任务,采用以下公式计算得到的结果要优于上述硬分配方式:

在上面的公式中,$m_i$ 代表[h,w] 位置属于 $mask _i$的概率, 而 $p_i(c)$ 代表$mask _i$属于第i类的概率。
2.4 实验部分
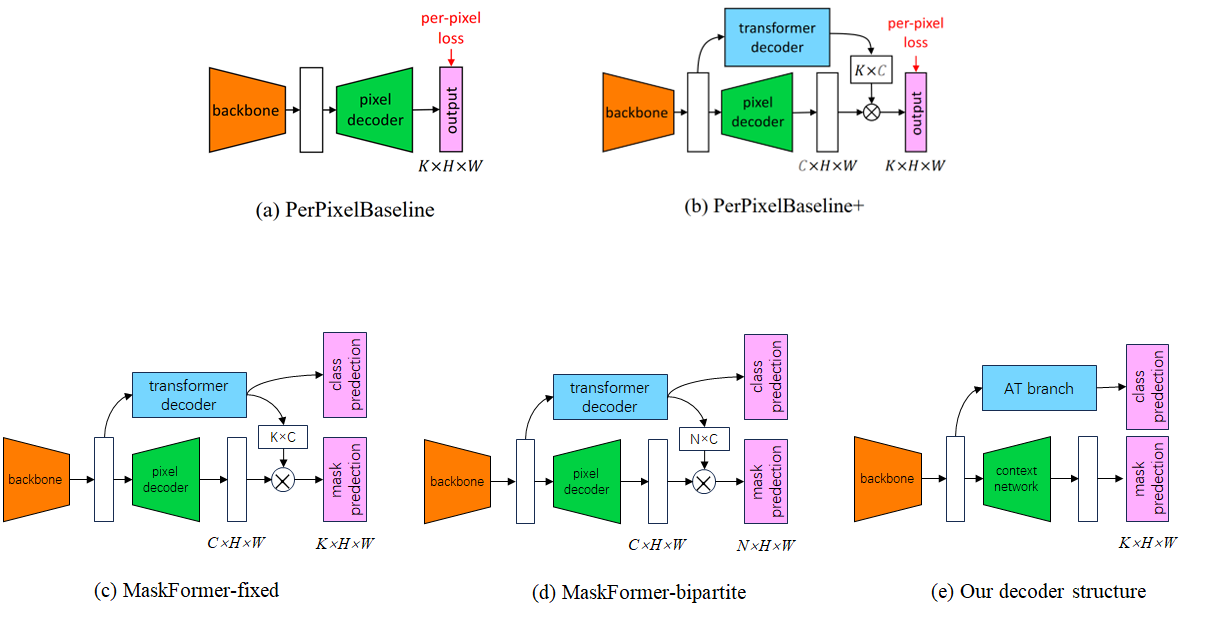
2.4.1 五种结构
实验部分对比了下图中a-d的模型结构。其中(a)是最基本的逐像素预测结构,(b)在A的基础上,添加了transformer decoder 分支,这样A和B的区别仅在于损失计算方式上(per-pixel vs. mask classification),换句话说,也就是损失函数上增加了额外的全局类别损失。(c) 图为采用fixed matching的结构,其中N=K; (d)为bipartite matching, 而(e)为我们之前采用的声音事件检测模型架构。
2.4.2 实验结果与消融
- maskformer同时在语义分割和全景分割任务中取得了SOTA;
- 对于语义分割任务,当数据集类别数较多时,maskformer相比于逐像素的方法性能提升更加明显;
- 对于a,b,c,d四种模型,性能排序依次为 (d) > (c) > (b) > (a);
- 当查询数N=100时,模型在不同数据集性能最好,即使当 N<K。显然maskformer中同一个query可以查询不同类别;
- 作者统计了不同query对应的类别,可以发现其分布并不是均匀的: 有的query对应了很多事件,而有些query甚至不对应一个特定的事件;
- 作者对共享一个query的列表关系进行了分析,但有趣的是,作者发现共享一个query的类别可能具有语义相似性("house" and "building"),也可能几乎不存在语义相关性((e.g. "water" and "sofa")。
- 虽然实验中decoder的数目为6层。但作者发现,对于语义分割任务而言,只需一层decoder也可以做的很好。作者认为,对于实例分割任务,需要有足够多层的解码器,用于将不同的实例之间区分开,而对于语义分割则不存在这一问题(对语义的编码在编码层已经做得很好了),所以对语义分割任务,只需要浅浅的一层解码器也能做的不错。