Flow
1 Normalizing Flows
在笔记 ‘生成式算法概述' 中,我们已经对 Normalizing Flows 技术有了大致的了解,其通过以下公式将输入的高斯分布转化为目标分布:
\[p_{G}(x)=\left| J_{G^{-1}} \right|\pi(G^{-1}(x))\]关于如何设计网络,使得雅可比矩阵的行列式可知, 目前应用较多的策略是基于Coupling Layer的策略,其结构如下图所示:
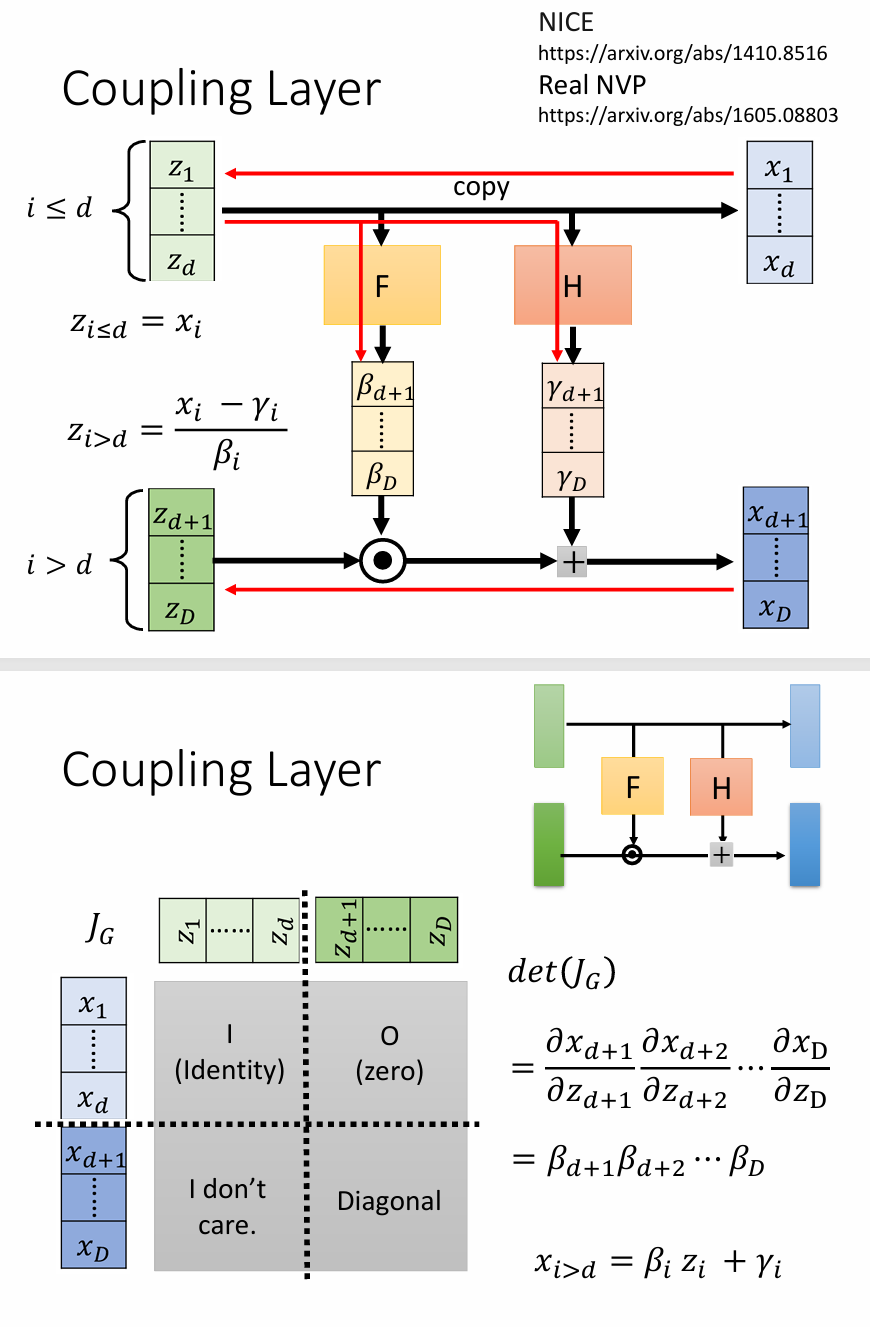
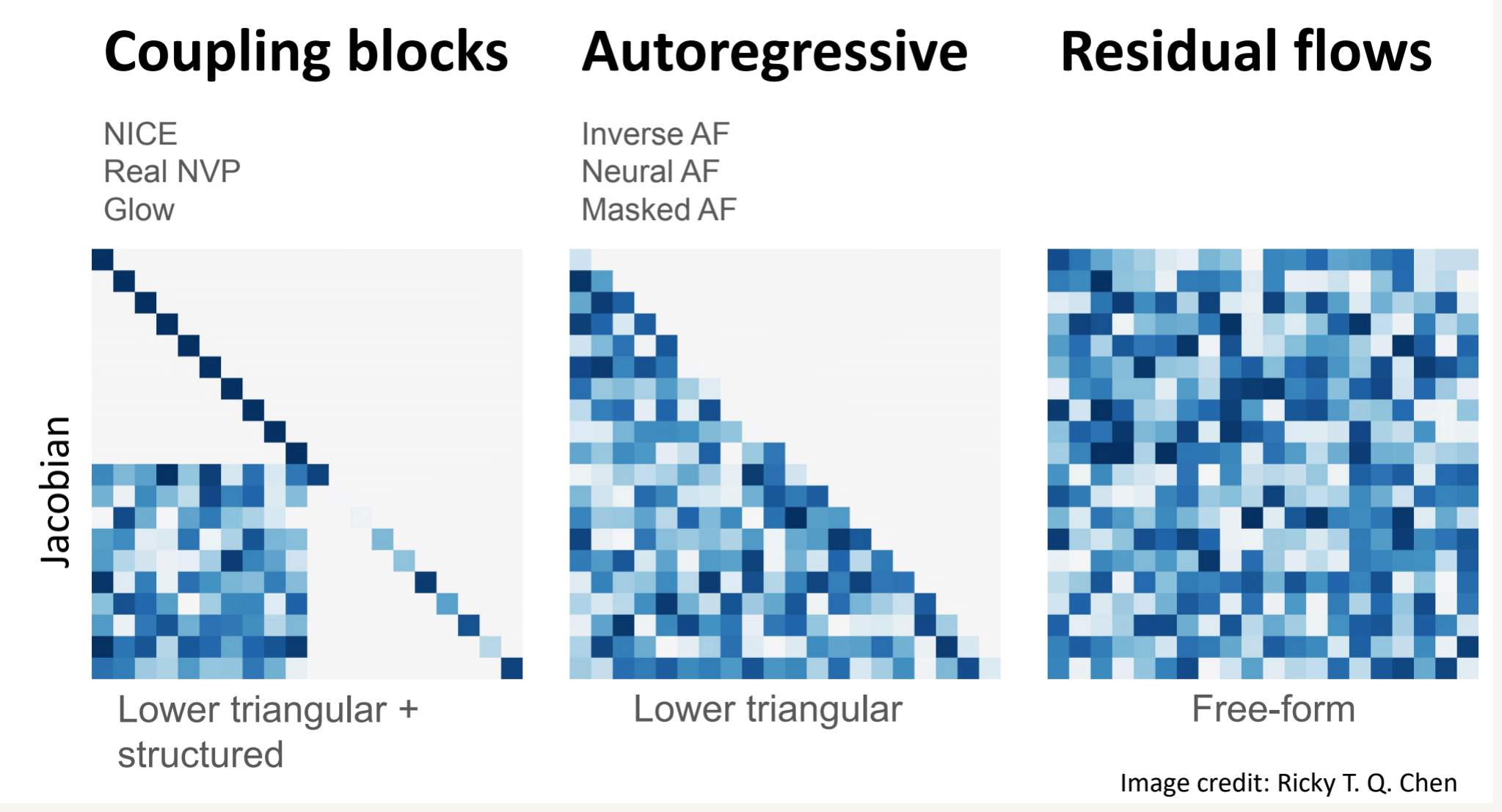
下图展现了几种常见的 Normalizing Flows 的实现策略,可以看到 Coupling Layer 策略的雅可比矩阵容易计算,但缺点是由于对其形式的限制,导致其函数的表现力不足。而对于下图的 Residual flow, 其具有形式 $x = z+u(z)$ , 即每一次更新残差。该方法虽然限制少,表现力强,但缺点在于雅可比矩阵不容易计算。
伪代码实现
从伪代码可以看出,通过 Normalizing Flows 可以得到样本x对应的概率,该概率作为优化目标。
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
# 1. Coupling Layer: 采用 RealNVP 风格的 Affine Coupling
class AffineCoupling(nn.Module):
def __init__(self, in_channels):
super().__init__()
self.scale_net = nn.Sequential(
nn.Conv2d(in_channels // 2, in_channels, kernel_size=3, padding=1),
nn.ReLU(),
nn.Conv2d(in_channels, in_channels // 2, kernel_size=3, padding=1),
nn.Tanh() # 输出 scale
)
self.translate_net = nn.Sequential(
nn.Conv2d(in_channels // 2, in_channels, kernel_size=3, padding=1),
nn.ReLU(),
nn.Conv2d(in_channels, in_channels // 2, kernel_size=3, padding=1)
)
def forward(self, x, reverse=False):
x1, x2 = x.chunk(2, dim=1) # Split channels
s = self.scale_net(x1)
t = self.translate_net(x1)
if not reverse:
x2 = x2 * torch.exp(s) + t
else:
x2 = (x2 - t) * torch.exp(-s)
return torch.cat([x1, x2], dim=1), torch.sum(s, dim=[1, 2, 3]) # 返回 log-determinant
# 2. Normalizing Flow Model
class RealNVP(nn.Module):
def __init__(self, in_channels, num_flows=4):
super().__init__()
self.flows = nn.ModuleList([AffineCoupling(in_channels) for _ in range(num_flows)])
def forward(self, x):
log_det_jacobian = 0
for flow in self.flows:
x, log_det = flow(x, reverse=False)
log_det_jacobian += log_det
return x, log_det_jacobian
def reverse(self, z):
for flow in reversed(self.flows):
z, _ = flow(z, reverse=True)
return z
# 3. 训练函数
def train(model, data_loader, optimizer, num_epochs=10):
model.train()
for epoch in range(num_epochs):
for x in data_loader:
x = x.to(device)
z, log_det = model(x)
log_p_z = -0.5 * torch.sum(z ** 2, dim=[1, 2, 3]) # 假设标准正态分布
loss = -torch.mean(log_p_z + log_det) # 最大化对数似然
optimizer.zero_grad()
loss.backward()
optimizer.step()
print(f"Epoch {epoch+1}, Loss: {loss.item()}")
# 4. 生成图像
def generate_samples(model, num_samples=16):
z = torch.randn(num_samples, 3, 32, 32).to(device) # 采样标准正态分布
samples = model.reverse(z) # 通过逆变换生成
return samples
# 初始化模型与优化器
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = RealNVP(in_channels=3, num_flows=6).to(device)
optimizer = optim.Adam(model.parameters(), lr=1e-3)
# 训练示例
# data_loader = ... # 假设我们有一个图像数据集的 DataLoader
# train(model, data_loader, optimizer, num_epochs=10)
# 生成图像示例
# samples = generate_samples(model)
# visualize(samples) # 假设有一个可视化函数
2 Continuous Normalizing Flows
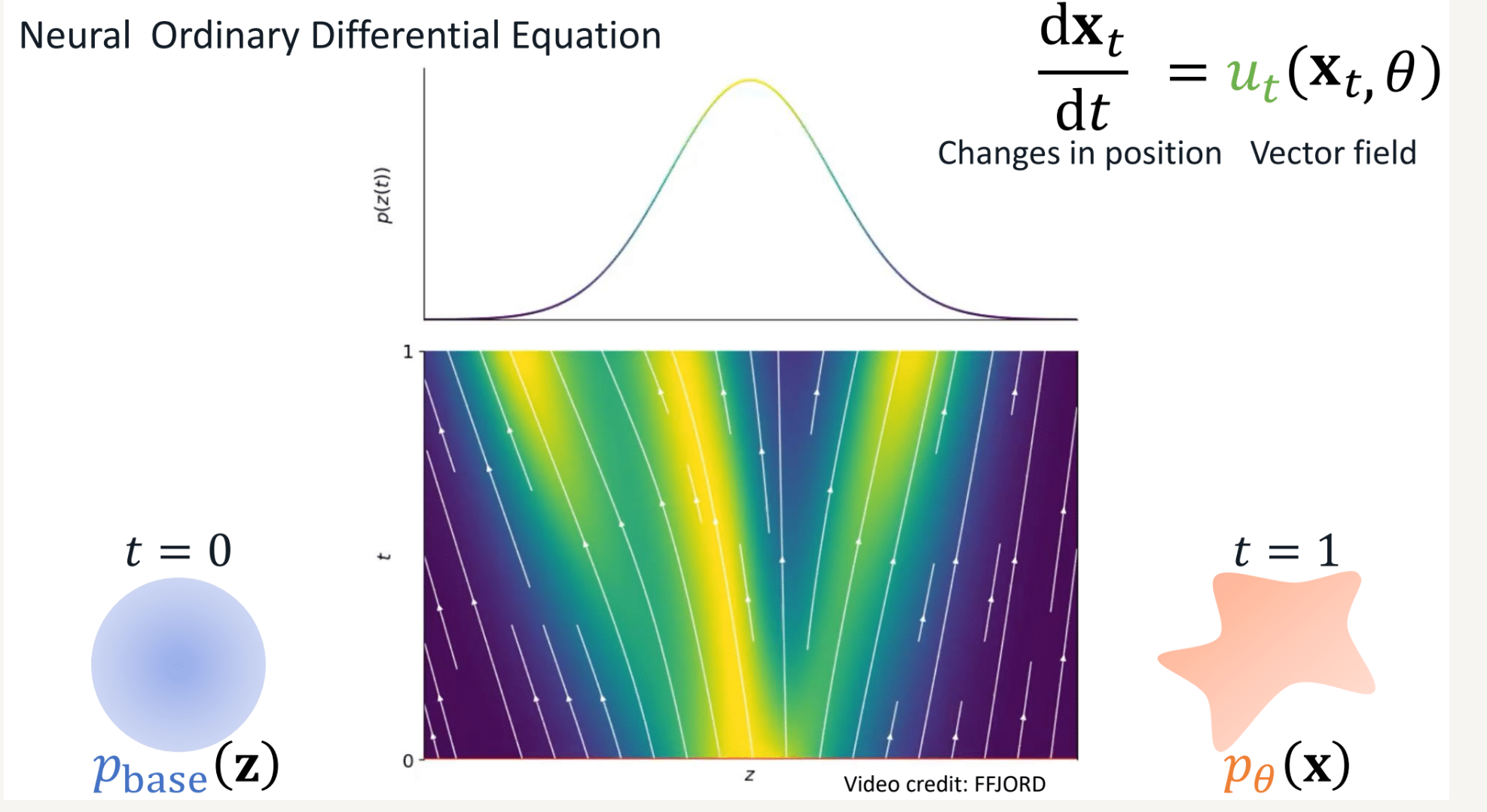
注意到在 residual flows 中,可以通过每次更新残差的方式,让分布逐渐从高斯分布变到目标分布。假设这一更新过程是连续的,而不是离散的。t 时刻的数据点 $x_t$ 经过模型的变换,在 $t+dt$ 时刻变换为了 $x_{t+dt}$ , 则定义向量场 $u(x_t, \theta)$ 为 :
\[\frac{dx_t}{dt}=u(x_t, \theta)\]其中向量场u 即为 "流" (flow), 或称为向量场 (Vector field)。如果我们可以对向量场 $u_t (x_t, \theta) $ 进行建模,那么只需从 $x_0 \in N(0, \textbf{I})$ 中随机采样,再通 过积分,就可以得到 $x_1$(当然,实际的积分是采用数值积分,过程是离散的)
\[x_1 = x_0 + \int_{0}^{1} u(x_t, \theta) dt\]总结来说,Continuous Normalizing Flows 将数据从高斯分布演变到目标分布的过程视作为通过场来实现的,如下图所示 (或点击查看 gif demo)
这里将概率类比为流体,由于总的概率积分是1,就类似于流体的总量是一定的,因此对x点来说,有以下公式(Continuity Equation)成立
\[\frac{\partial p_t(x)}{\partial t} + \text{div} \left( p_t(x) u_t(x) \right) = 0\]该公式的含义是某处概率密度的变化等于"流出"和"流入"x概率的"流量"之差。该公式是是向量场 u 产生对应的概率密度路径 p(x)的充要条件。换句话说,已知 $p_t$ 的情况下,只要找到一个符合上述等式的 $u_t$ , 那么该$u_t$ 就一定是合理的。
3 Flow Matching
Continuous Normalizing Flows 并不好求解,因为想要找到合适的 u 并不容易。Flow Matching 的思想是,构建一个模型,来学习去预测这个场。
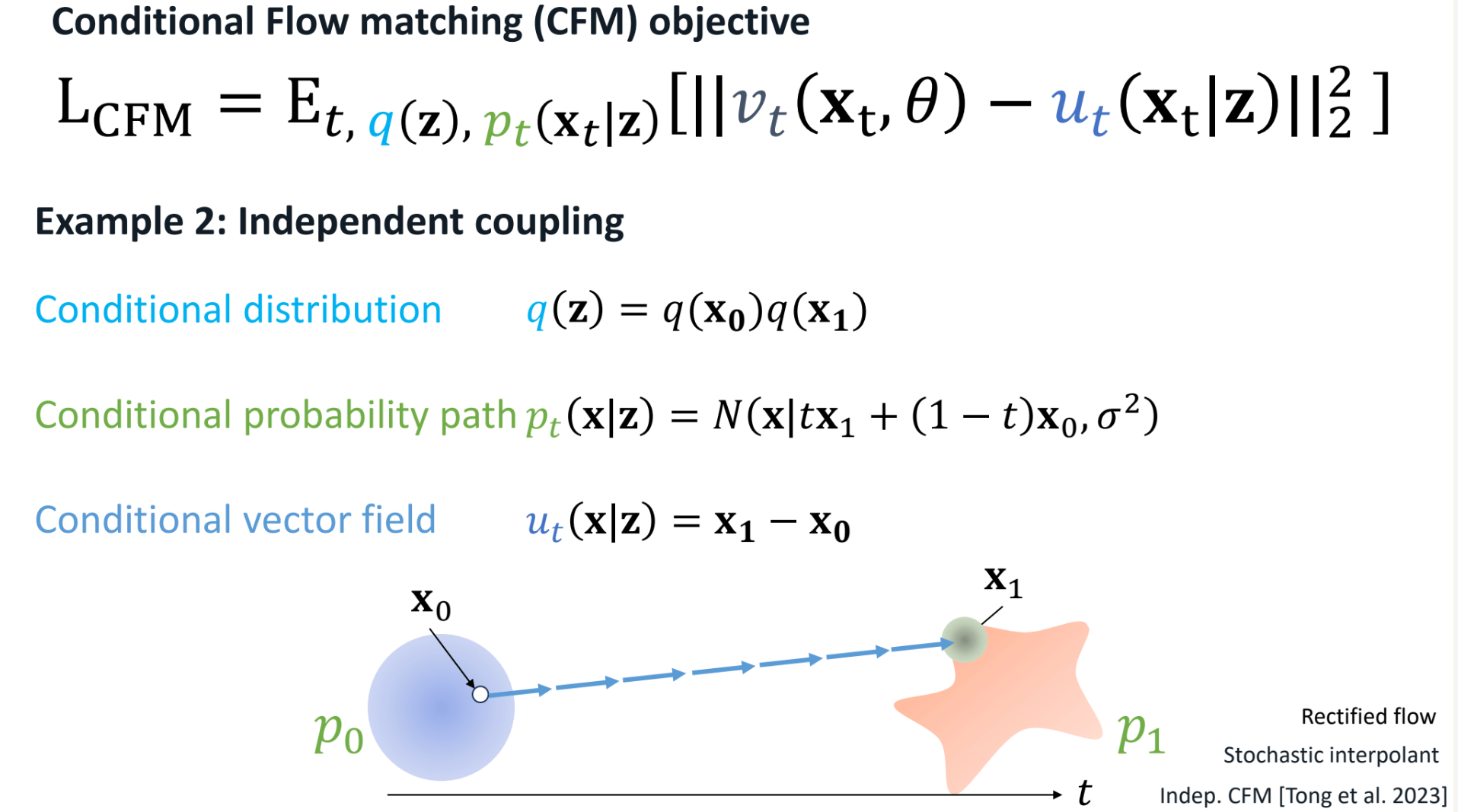
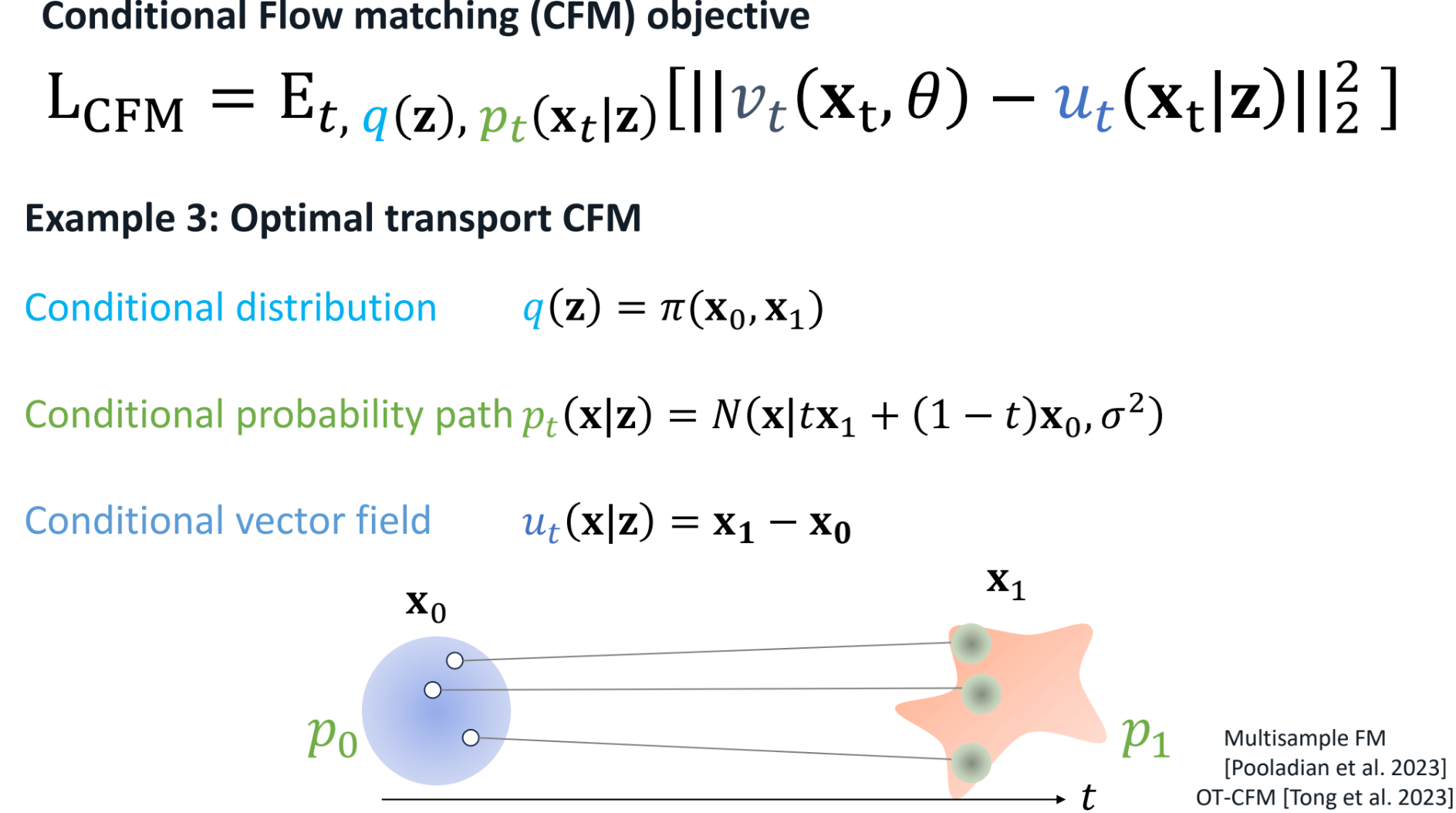
\[L_{\text{FM}} = \mathbb{E}_{t, p_t(\mathbf{x}_t)} \left[ \left\| v_t(\mathbf{x}_t, \theta) - u_t(\mathbf{x}_t) \right\|_2^2 \right]\]可以将总的概率视作通过对条件概率进行边缘积分得到:
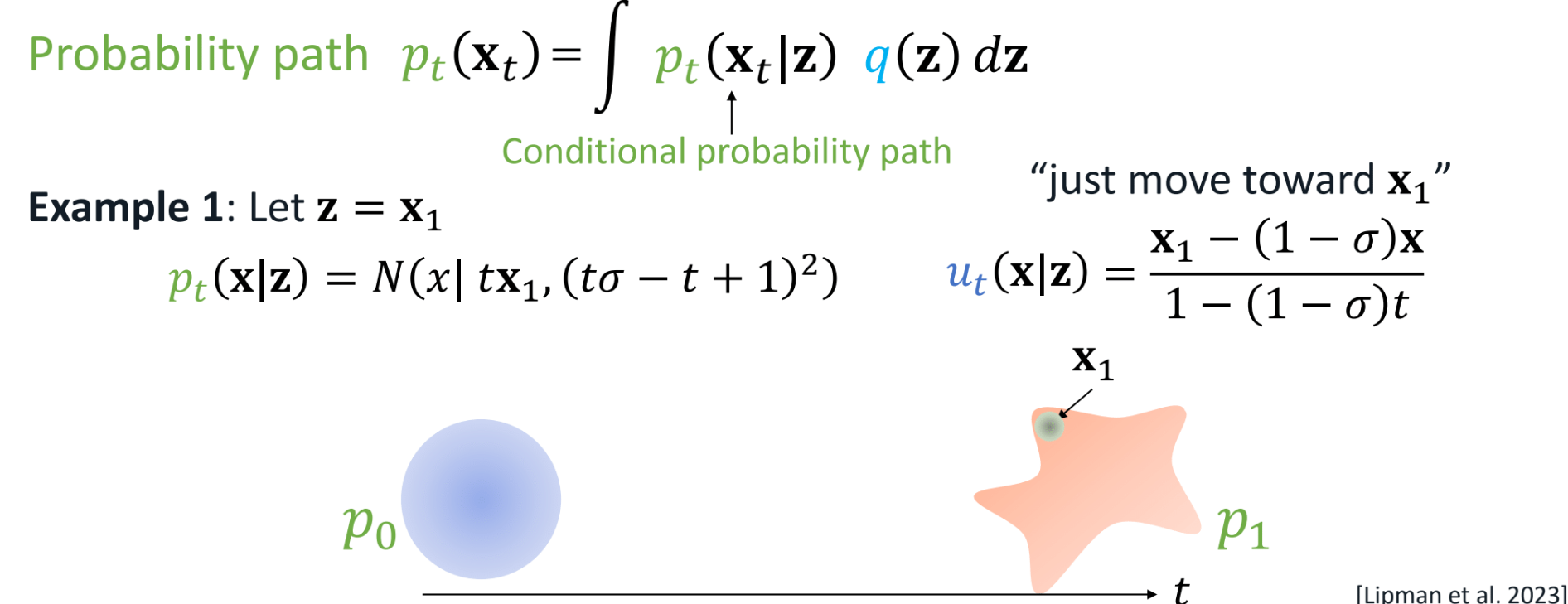
\[p_t(\mathbf{x}_t) = \int p_t(\mathbf{x}_t | \mathbf{z}) \, q(\mathbf{z}) \, d\mathbf{z}\]而也可以证明在数据点 x 处的向量场 $u_t(x)$ 是通过对所有可能的初始条件 x1 的条件向量场$ u_t(x∣x_1)$ 加权积分得到。 这里的z作为条件,其设置是灵活的。根据条件z的不同,flow matching 可以分为三种不同情况:
3.1 conditional flow matching
首先假设已知生成目标, 即路径的终点是x1。只要满足如下两个边界条件,就能作为条件概率路径 $p_t$ :
- t=0时是标准高斯分布;
- t=1时服从以均值为x1, 方差足够小的高斯分布;
而当构造了路径 $p_t$ 之后,变化速度 $u_t$ 也可以根据 Continuity Equation 构造出来。总而言之,对CFM 我们有以下的路径p和速度u
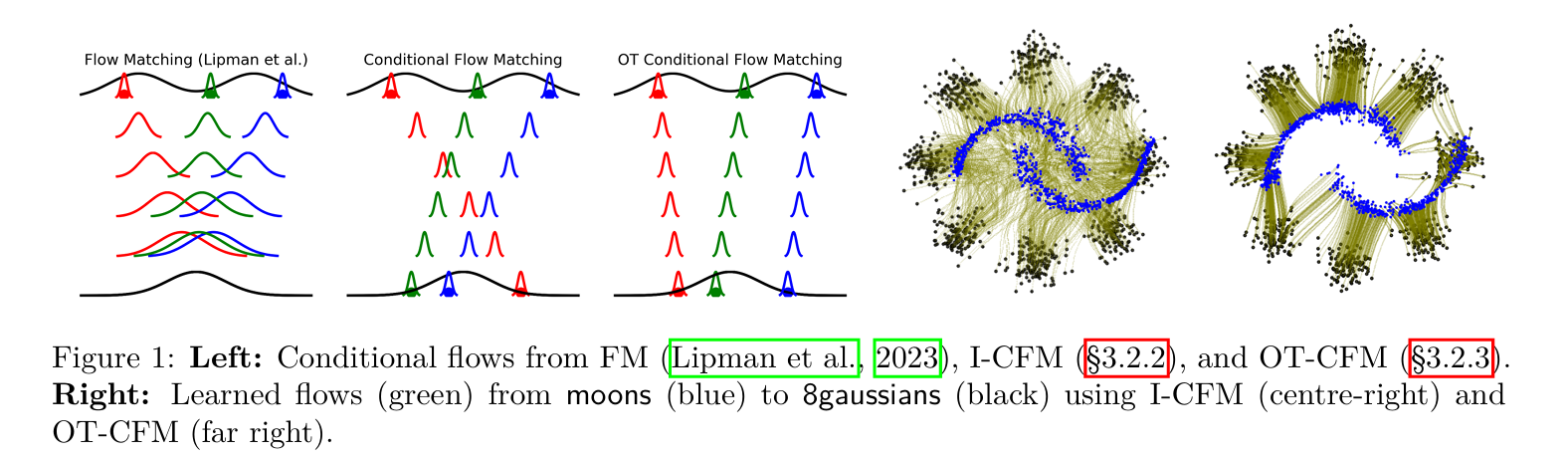
3.2 Independent coupling (I-CFM)
该条件下假设 x1 和 x0 均已知且独立,这种情况下路径如下。
3.3 Optimal transport CFM (OT-CFM)
在有多个x0和x1的情况下,OTT-CFM根据最佳传输理论, 为x0分配最优的x1,如下图所示
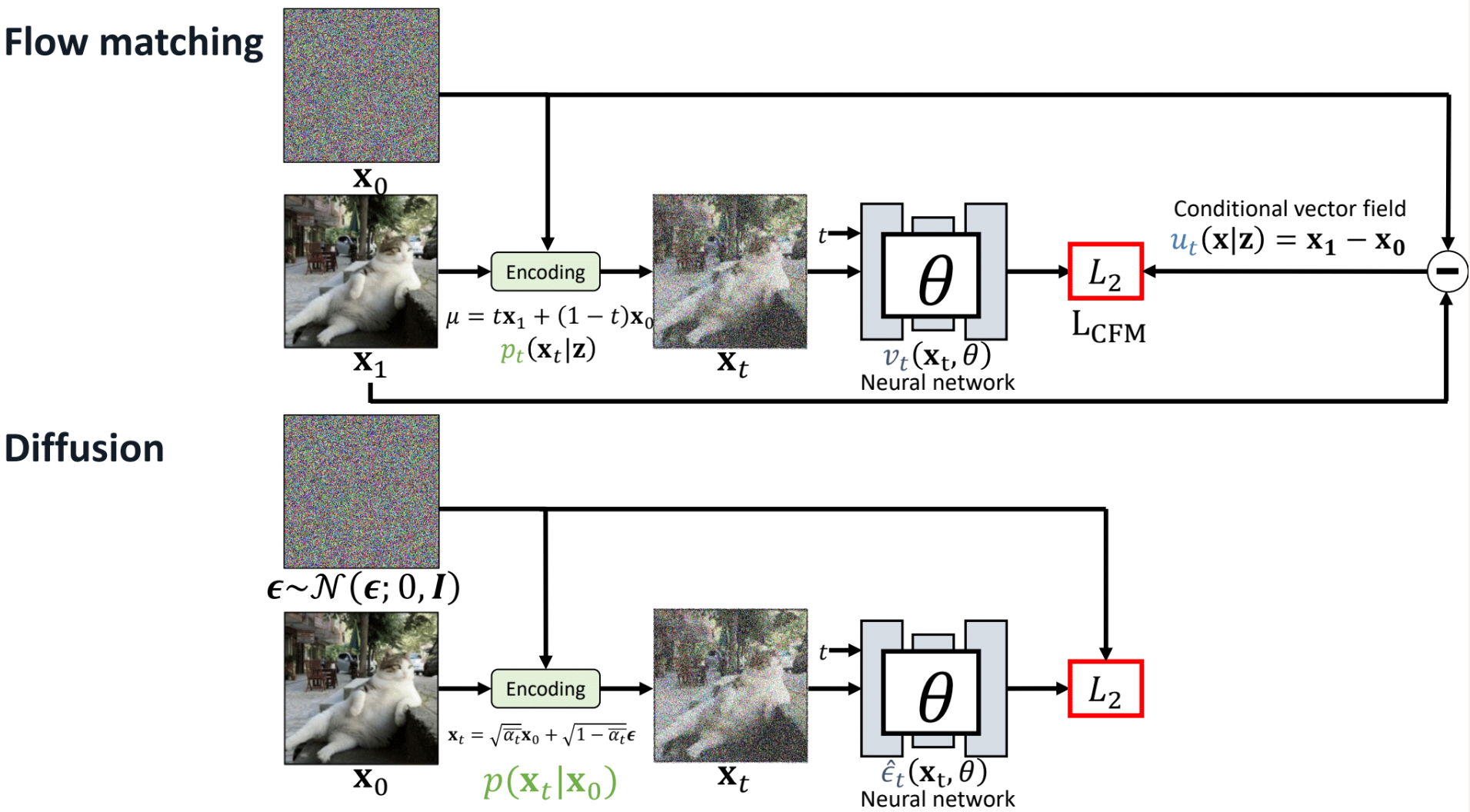
3.4 与 Diffusion
Flow match允许使用各种可微分函数来定义p和u ,可以根据不同的应用场景和边界条件选择合适的函数。事实上,可以将 flow matching 与diffusion 统一到一套框架下1。可以看到,下图中 flow-matching 的训练方法和diffusion的训练过程高度相似。所以说虽然二者来源可能不一样,但最后实践下来形式是高度相似的。